Courses
Courses
Blogs
Blogs
Tags
Reviews
Stories
Contact Us
EnjoyMathematics
binary-tree
Delete Node in a Binary Search Tree
17 August 2024
Validate Binary Search Tree (BST)
16 August 2024
Level Order Traversal (BFS Traversal) of Binary Tree
15 August 2024
Find Height of a Binary Tree
15 August 2024
Iterative Preorder, Inorder and Postorder Traversal Using Stack
15 August 2024
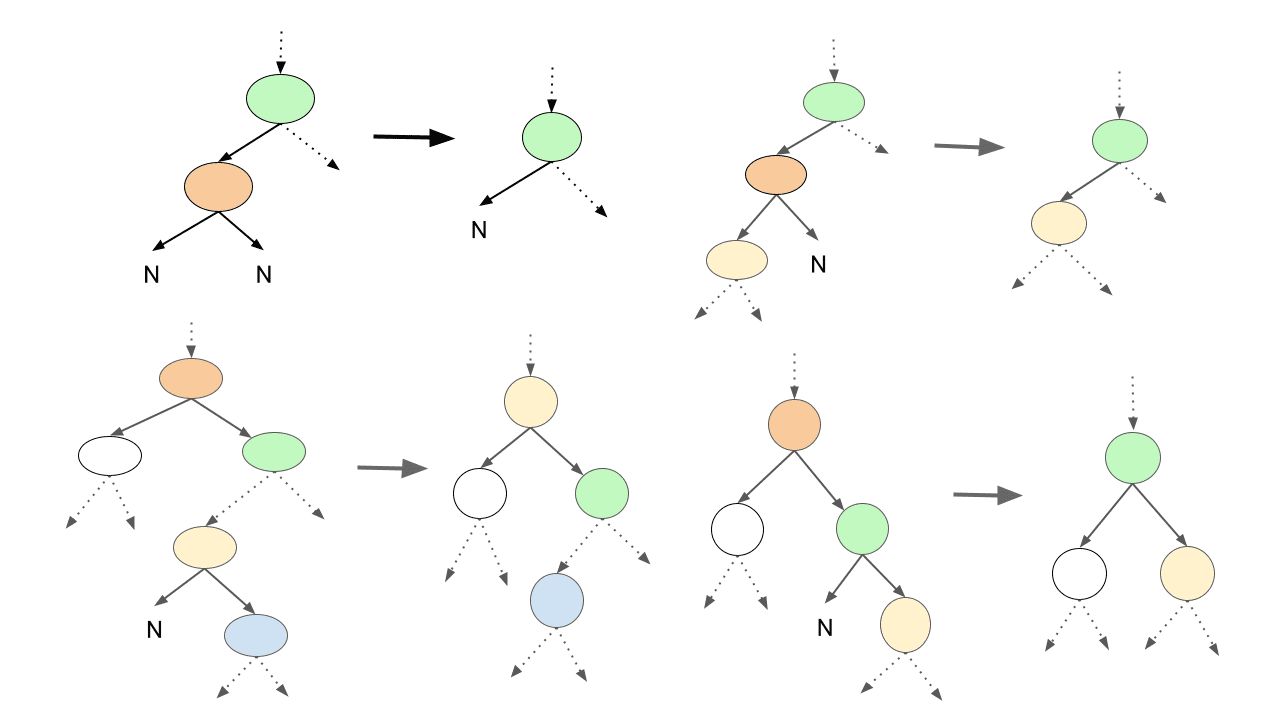
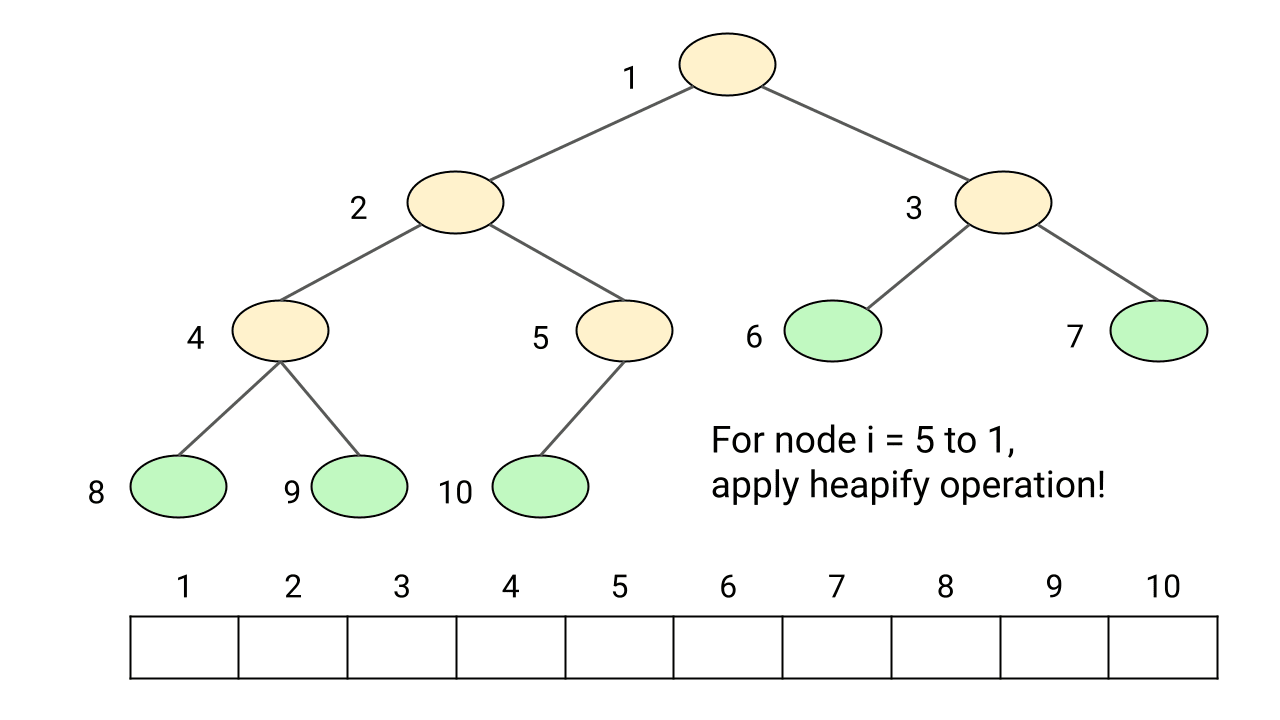
How to Build a Heap from an Array?
06 September 2023
Load More Blogs
Find us on:
Linkedin
Medium
Facebook
Twitter
Courses
Latest Blogs
Shubham Blogs
Ravish Blogs
Popular Tags
EnjoyMathematics
About Us
Contact Us
Terms and Conditions
Refund Policy
Privacy Policy
Cookie Policy
©2023 Code Algorithms Pvt. Ltd.
All rights reserved.